Nội Dung Chính
Trang 54
Học xong bài này em sẽ:
Vận dụng được nguyên lí hoạt động của cảm biến siêu âm và cảm biến dò đường để lập trình điều khiển robot tự động di chuyển trên sa bàn.
Khởi động
Chuẩn bị sa bàn
Em có thể tự chuẩn bị một sa bàn cho robot di chuyển. Có thể sử dụng một tấm bia hoặc một tấm nhựa trắng có kích thước phù hợp để làm sa bàn, sau đó sử dụng băng dính đen (thường dùng để quấn dây điện) để ghép, dán thành những đường di chuyển và đảm bảo:
- Đường di chuyển phải được dán trên bề mặt bằng phẳng àa có màu sáng tương phản cao với màu đen. Ví dụ dán băng dính màu đen lên giấy bìa màu trắng khổ A1 hoặc khổ A0
- Hình dạng đường di chuyển có thể là đường thẳng, đường cong đảm bảo đủ không gian cho robot di chuyển.
- Đường băng dính có độ rộng lớn hơn độ rộng giữa hai mắt cạnh nhau của cảm biến dò đường.

Hình 12.1. Hình ảnh sa bàn
Trang 55
- Vật cản có thể là: khối xốp, khối gấp bằng giấy,... sao cho đảm bảo khối lượng nhẹ, kích thước (dài x rộng x cao) tối thiểu 36 x 46 x 95 mm và tối đa 100 x 150 x 98 mm.
Ngoài ra chúng ta cũng có thể quy định các vị trí sau đây trên sa bàn để dễ dàng ghi nhớ trong quá trình thực hành.
- Bắt đầu: Vị trí đặt robot ban đầu tuỳ theo từng nhiệm vụ.
- Kết thúc: Vị trí robot dừng lại.
- Vị trí A, B: Các vị trí đặt vật cản. Vật cản được đặt ngẫu nhiên tại A hoặc B sao cho vật cản chắn được tín hiệu phát ra từ cảm biến siêu âm của robot.
- Vị trí C, D, E: Vị trí mở rộng (dành cho các bài luyện tập mở rộng và nâng cao).
Chú ý: Đường di chuyển của robot là màu đen với độ rộng tiêu chuẩn 3 cm.
Nhiệm vụ 1
Yêu cầu
Lập chương trình điều khiển robot đi một vòng quanh sa bàn theo chiều ngược kim đồng hồ xuất phát từ vị trí Bắt đầu và dừng tại vị trí Kết thúc.
Phân tích
Để thực hiện nhiệm vụ 1, em cằn vận dụng các kiến thức đã học về cảm biến dò đường 2 mắt để điều khiển robot di chuyển chính xác theo đường đi trên sa bàn.
Chuẩn bị
Sa bàn, robot có gắn thành phần động cơ, cảm biến dò đường.
Thực hiện
Trong thực tế, khi được cấp cùng một nguồn hoạt động thì các động cơ DC vẫn không xoay với tốc độ bằng nhau do giữa chúng tồn tại chênh lệch về tốc độ xoay. Do vậy, em có thể điều chỉnh tốc độ của từng động cơ với các mức chênh lệch tốc độ khác nhau, ví dụ, giữ nguyên tốc độ một động cơ và tăng hoặc giảm tốc độ động cơ còn lại, sau đó chạy thử để kiểm tra kết quả và điều chỉnh cho chính xác.
Hướng dẫn
Hướng dẫn sau đây được lập trình thực tế trên phần mềm GaraBlock để mình họa.
Bước 1. Lập trình cho bốn trường hợp của cảm biến dò đường,
- Trường hợp 1: Khi cả hai mắt tín hiệu cảm biến dò đường cùng nằm trên đường màu đen, em cần lập trình cho robot đi thẳng với tốc độ phù hợp (Hình 12.2)

Hình 12.2. Chương trình điều khiển robot đi thẳng
Trang 56
Em có thể sử dụng câu lệnh điều khiển từng động cơ với tốc độ khác nhau để robot đi thẳng chính xác hơn. Trong trường hợp này, chúng ta có thể thay câu lệnh
kéo thả đi thẳng thành hai câu lệnh điều khiển động cơ M1 và động cơ M2 với tốc độ khác nhau. Ví dụ, các lệnh ở Hình 12.3 cho thấy tốc độ của động cơ M1 nhỏ hơn tốc độ của động cơ M2 là 5.

Hình 12.3. Các lệnh điều khiển robot đi thẳng bằng cách điều khiển từng động cơ
- Trường hợp 2: Khi cảm biến dò đường bị lệch phải, em cần lập trình cho robot xoay trái với tốc độ phù hợp (Hình 12.4).

Hình 12.4. Chương trình điều khiển robot xoay trái
- Trường hợp 3: Khi cảm biến dò đường bị lệch trái, em cần lập trình cho robot xoay phải với tốc độ phù hợp (Hình 12.5).

Hình 12.5. Chương trình điều khiển robot xoay phải
- Trường hợp 4: Khi cả hai mắt tín hiệu cảm biến dò đường cùng nằm trên vùng màu trắng, cần lập trình cho robot dừng lại. Ví dụ chương trình trong Hình 12.6.

Hình 12.6. Chương trình điều khiển robot dừng lại
Kết hợp cả bốn trường hợp trên, em sẽ lập được chương trình điều khiển robot sử dụng cảm biến dò đường thực hiện nhiệm vụ 1. Chương trình như Hình 12.7.
Trang 57

Hình 12.7. Chương trình hoàn chỉnh
Bước 2. Kết nối robot với máy tính và tiến hành nạp chương trình đã lập vào robot.
Bước 3. Sau khi nạp chương trình thành công, đặt robot vào vị trí bắt đầu trên sa bàn sao cho cả hai mắt của cảm biến dò đường đều nằm trên đường màu đen. Sau đó bấm nút chuyển đến chế độ lập trình với máy tính (vòng đèn LED màu trắng) trên mạch điều khiển của robot và quan sát kết quả, robot sẽ di chuyển từ vị trí Bắt đầu và tự động dừng lại tại vị trí Kết thúc.
Nhiệm vụ 2
Yêu cầu
Lập chương trình điều khiển robot đi một vòng quanh sa bàn, nếu gặp vật cản thì đổi hướng di chuyển.
Phân tích
Trong nhiệm vụ này, em cần lập trình kết hợp giữa cảm biến dò đường và cảm biến siêu âm để robot đi theo vạch cơ bản, đổi hướng di chuyển khi phát hiện vật cản.
Chuẩn bị
Chuẩn bị robot như ở nhiệm vụ 1 và gắn thêm thành phần cảm biến siêu âm.
Thực hiện
Em có thể sử dụng lại chương trình đã lập cho cảm biến dò đường ở nhiệm vụ 1 và lập trình cảm biến siêu âm phát hiện vật cản trong phạm vi 10 cm. Khi phát hiện có vật cản trong phạm vi 10 cm, robot đổi hướng di chuyển (có thể xoay trái hoặc xoay phải với thời gian hợp lí cho đến khi phát hiện được vạch cơ bản thì tiếp tục đi thẳng).
Hướng dẫn
Hướng dẫn sau đây được lập trình thực tế trên phần mềm GaraBlock để minh hoạ.
Bước 1. Lập trình kết hợp cảm biến dò đường và cảm biến siêu âm.
Khi cảm biến siêu âm phát hiện có vật cản trong khoảng 10 cm, robot sẽ xoay trái trong khoảng 1 giây (thời gian có thể tuỳ chỉnh nếu cần) đến khi gặp vạch kẻ đường thì tiếp tục di chuyển theo vạch kẻ đường. Ví dụ chương trình trong Hình 12.8.
Trang 58

Hình 12.8. Chương trình điều khiển robot đổi hướng di chuyển khi có vật cản
Kết hợp chương trình đã lập ở nhiệm vụ 1 (đã hiệu chỉnh tốc độ lệnh đi thẳng và thay đổi câu lệnh di chuyển của trường hợp 4 như chương trình tổng quát) với chương trình ở Hình 12.8 để hoàn thành nhiệm vụ 2. Ví dụ chương trình trong Hình 12.9.

Hình 12.9. Chương trình hoàn thiện để robot thực hiện nhiệm vụ 2
Bước 2. Kết nối robot với máy tính và tiến hành nạp chương trình đã lập vào robot.
Bước 3. Sau khi nạp chương trình thành công, em cần đặt robot vào vị trí Bắt đầu và đặt vật cản vào vị trí A hoặc B trên sa bàn. Sau đó bấm nút chuyển đến chế độ lập trình với máy tính và quan sát kết quả. Robot sẽ di chuyển từ vị trí Bắt đầu và tự động dừng lại khi gặp vật cản trong khoảng 10 cm, khi lấy vật cản ra khỏi phạm vi 10 cm thì robot tiếp tục di chuyển và sẽ dừng lại khi tiếp tục gặp vật cản trong khoảng 10 cm.
LUYỆN TẬP
Em hãy lập chương trình điều khiển robot di chuyển trên sa bàn, xuất phát từ vị trí Bắt đầu đến vị trí Kết thúc thì quay lại vị trí Bắt đầu. Lưu ý: robot không dừng lại mà di chuyển liên tục từ vị trí Bắt đầu đến vị trí Kết thúc và ngược lại.
VẬN DỤNG
Em hãy lập chương trình điều khiển robot di chuyển trên sa bàn, khi gặp vật cản thì dừng lại trong 3 giây sau đó đổi hướng di chuyển.
Các Bài Học Khác
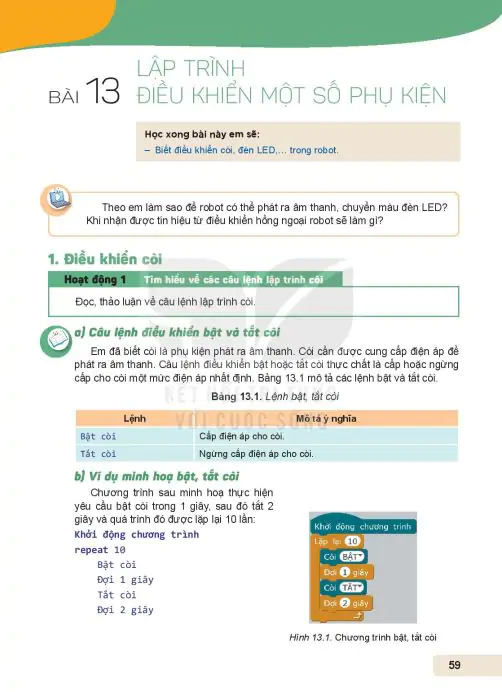
Chuyên đề học tập Tin học 10 - Bài 13: Lập Trình Điều Khiển Một Số Phụ Kiện - Tìm hiểu cách lập trình để robot điều khiển các phụ kiện đi kèm, mở rộng khả năng thực hiện nhiệm vụ.
Xem thêm ⟶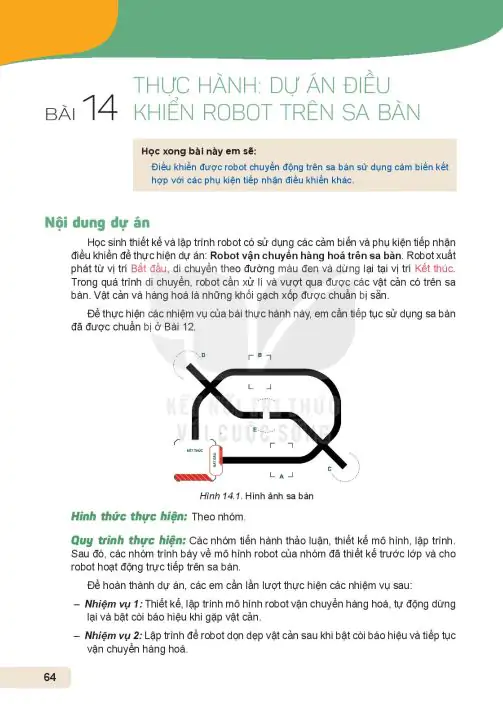
Chuyên đề học tập Tin học 10 - Bài 14: Thực Hành: Dự Án Điều Khiển Robot Trên Sa Bàn - Vận dụng kiến thức để lập trình và điều khiển robot thực hiện một nhiệm vụ tổng hợp trên sa bàn.
Xem thêm ⟶










Bình Luận
Để Lại Bình Luận Của Bạn