Nội Dung Chính
Trang 35
Học xong bài này em sẽ:
Dùng phần mềm kiểm tra được trạng thái sẵn sàng hoạt động của robot với các thiết bị đã kết nối.
Nhiệm vụ 1. Nạp chương trình kiểm tra động cơ
Chương trình điều khiển robot được sử dụng để nạp chương trình kiểm tra động cơ.
Phần hướng dẫn thực hành sử dụng bộ công cụ G-Robot Creator để minh hoạ.
Hướng dẫn
Bước 1. Khởi động phần mềm GaraBlock, chọn Sửa/Chế độ Grobot.

Hình 8.1. Cách chọn Chế độ Grobot
Bước 2. Tạo các câu lệnh lập trình như Hình 8.2.

Hình 8.2. Câu lệnh lập trình
Khởi động chương trình
1. Đi thẳng với tốc độ 150
Đợi 4 giây
3. Dừng lại
Trang 36
Bước 3. Kết nối bảng mạch điều khiển với máy tính bằng dây nối, chọn Kết nối/Cổng kết nối Robot (Serial)/COM3 (Số thứ tự COM có thể thay đổi tuỳ máy tính).

Hình 8.3. Cách chọn cổng kết nối
Bước 4. Chọn Nạp chương trình cho GRobot.

Hình 8.4. Nạp chương trình cho robot
Bước 5. Đợi cho đến khi nạp chương trình hoàn tất.

Hình 8.5. Quá trình nạp chương trình
Nạp chương trình
Đang nạp chương trình
Đóng
⇒
Nạp chương trình
Nạp chương trình thành công
Đóng
Bước 6. Rút dây nối khỏi bảng mạch điều khiển. Bật công tắc nguồn.
Chuyển bảng mạch điều khiển robot sang chế độ lập trình với máy tính (vòng LED màu trắng). Cách chuyển robot sang chế độ lập trình: Nhấn lần lượt bốn lần nút chuyển chế độ ở giữa bảng mạch điều khiển robot để đến chế độ lập trình với máy tính. Mỗi lần bắm đợi 1 giây để đèn LED chuyển màu hoàn tất. Sau khi chuyển chế độ thành công, hai động cơ xoay trong vòng 4 giây rồi dừng.
Nhiệm vụ 2. Nạp chương trình kiểm tra cảm biến siêu âm
Hướng dẫn
Thực hiện các bước từ 1 đến 5 của nhiệm vụ 1. Tuy nhiên bước 2 thay bằng chương trình như Hình 8.6.
Trang 37

Hình 8.6. Chương trình kiểm tra cảm biến siêu âm
Khởi động Chương trình
Lặp lại vô tận
Nếu 15a. Nhận tín hiệu cảm biến siêu âm ở Cổng 3 (Bộ não B-Creator) <20> thì
3. Dừng lại
Ngược lại
1. Đi thẳng với tốc độ (50)
Bước 6. Rút dây nối khỏi robot. Bật công tắc nguồn.
Chuyển robot sang chế độ lập trình với máy tính (vòng LED màu trắng).
Sau khi chuyển chế độ thành công, robot sẽ liên tục kiểm tra cảm biến siêu âm. Nếu phía trước cảm biến siêu âm 20 cm có vật cản, động cơ sẽ dừng. Nếu không có vật cản, động cơ xoay liên tục.
Nhiệm vụ 3. Nạp chương trình kiểm tra động cơ servo
Hướng dẫn
Thực hiện các bước từ 1 đến 5 của nhiệm vụ 1. Tuy nhiên bước 2 thay bằng chương trình như Hình 8.7.
Bước 6. Rút dây nối khỏi robot. Bật công tắc nguồn.
Chuyển robot sang chế độ lập trình với máy tính (vòng LED màu trắng).
Sau khi chuyển chế độ thành công, động cơ servo sẽ lần lượt di chuyển đến các vị trí 0°, 90° và 180° và dừng lại.

Hình 8.7. Chương trình kiểm tra
Khởi động chương trình
14. Xoay động cơ servo từ Cổng 5 đến 0 độ
Đợi 1 giây
14. Xoay động cơ servo từ Cổng 5 đến 90 độ
Đợi 1 giây
14. Xoay động cơ servo từ Cổng 5 đến 180 độ
Đợi 1 giây
LUYỆN TẬP
Em hãy thay đổi cổng kết nối của động cơ Servo sang cổng số 6 trên mạch điều khiển và hiệu chỉnh, thêm câu lệnh ở chương trình trong Hình 8.7 để động cơ servo trở về và dừng tại vị trí 0 độ.
VẬN DỤNG
Em hãy lắp ráp mô hình robot có sử dụng động cơ servo và nạp chương trình ở nhiệm vụ 3 để kiểm tra động cơ servo.
Gợi ý: Em có thể lắp ráp mô hình robot đấu kiếm như Hình 8.8.

Hình 8.8. Robot đấu kiếm
Các Bài Học Khác
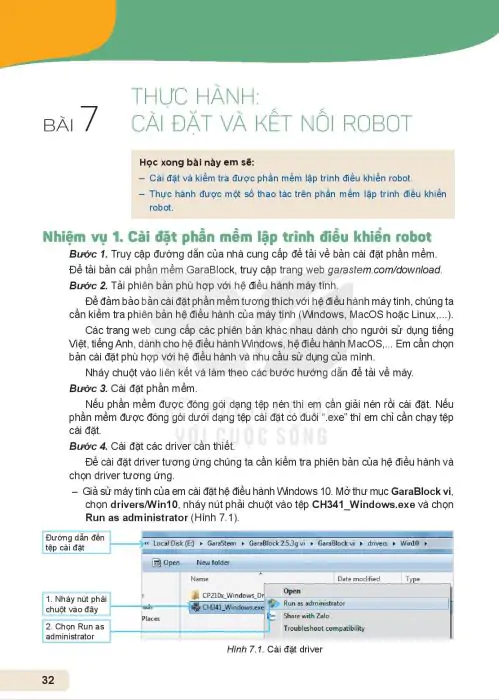
Chuyên đề học tập Tin học 10 - Bài 7: Thực Hành: Cài Đặt Và Kết Nối Robot - Thiết lập phần mềm và liên kết giữa robot với máy tính.
Xem thêm ⟶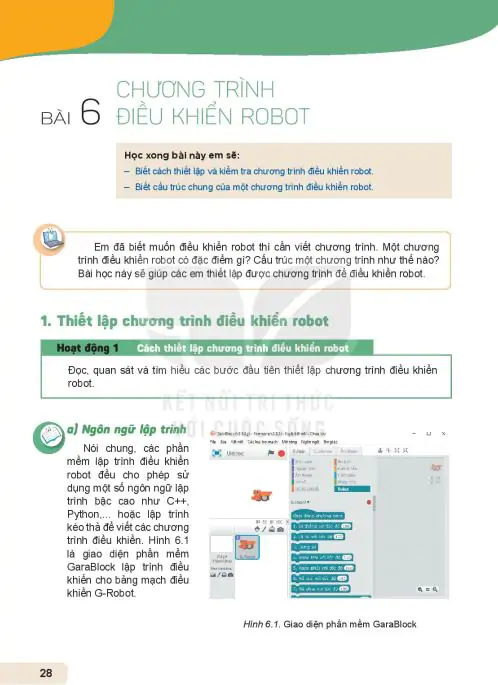
Chuyên đề học tập Tin học 10 - Bài 6: Chương Trình Điều Khiển Robot - Phân tích cấu trúc và nguyên lí hoạt động của các chương trình lập trình robot.
Xem thêm ⟶










Bình Luận
Để Lại Bình Luận Của Bạn